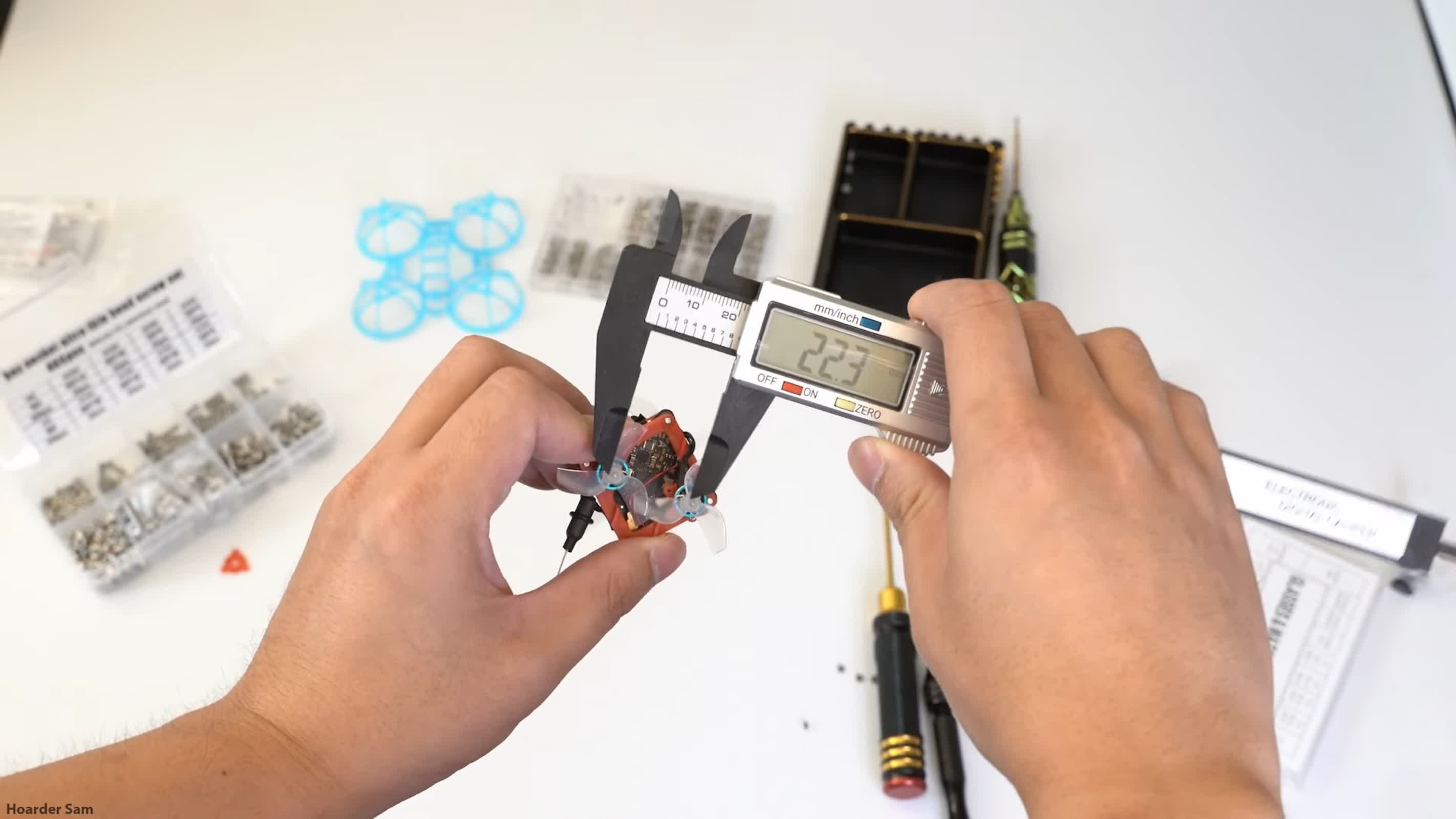
The takeaway: YouTube creator and DIY engineer Hoarder Sam has pushed the boundaries of microdrone engineering by unveiling what may be the smallest first-person-view (FPV) quadcopter ever flown. Measuring just 22.3 millimeters across its motor posts – barely the width of a coin – the handmade drone compresses the capabilities of a commercial 65-millimeter model into less than a third of its size while remaining fully controllable in flight.
The build's extreme compactness limits its practical use – without landing gear or shielding, takeoff and recovery require precision and care – but its technical ingenuity highlights a growing subculture of enthusiasts exploring physical limits in FPV design.
By combining high-performance commercial components with desktop fabrication tools, the YouTuber has not only demonstrated the viability of a 22-millimeter FPV drone but also set a benchmark for what can be achieved with consumer-grade technology and a methodical approach to miniaturization.

Sam's miniature aircraft began as a teardown of BetaFPV's Air65, one of the most compact FPV drones available. The Air65's brushless motor system, integrated 5.8 GHz analog video transmitter, and flight controller, powered by an STM32 G473 microcontroller with a high-precision ICM42688P gyroscope, form the electronics backbone of Sam's redesigned frame.
These components were relocated onto a custom 3D-printed structure that dropped the Air65's 65-millimeter wheelbase in favor of a radically compressed layout in which all four rotors overlap. To achieve this, Sam used CAD modeling in SolidWorks to design a new skeleton that would both lighten the build while fitting inside a Pringles can. The resulting craft, including battery and camera, weighs just 25 grams – lighter than some keychains.
The frame itself was printed on a Bambu Lab A1 Mini, a desktop 3D printer capable of 500-millimeter-per-second printing speeds and 0.12-millimeter layer resolution. The A1 Mini's high-speed CoreXY motion system and precision hot end, reaching up to 300°C, enabled Sam to produce the required fine tolerances and motor mounts without overhangs or support material.
Using red PLA filament, he printed the main chassis, motor plates, and camera mount as separate elements, later assembled with tiny M1.2 screws and rubber grommets for vibration damping.
Adapting the Air65's electronics to the new geometry required custom firmware changes. In Betaflight Configurator, Sam rotated the flight control orientation by 45 degrees to align it with the unconventional motor layout. He also reversed several motor directions to correct initial instability during test flights.

Once tuned, the drone lifted off successfully – by hand, since its propellers rest flush with the ground. It flew almost as smoothly as the original Air65, with steady pitch and roll control and only a slight drop in yaw responsiveness.
The microdrone's battery performance proved similarly surprising. Using a LAVA 1S 300 mAh cell, typical flight times averaged around three minutes – only 30 seconds shorter than its full-size counterpart. A smaller 260 mAh pack shaved another half-minute off that endurance, likely due to reduced capacity rather than power inefficiency.
World's smallest FPV drone? YouTuber builds quadcopter that fits inside a Pringles can
")
