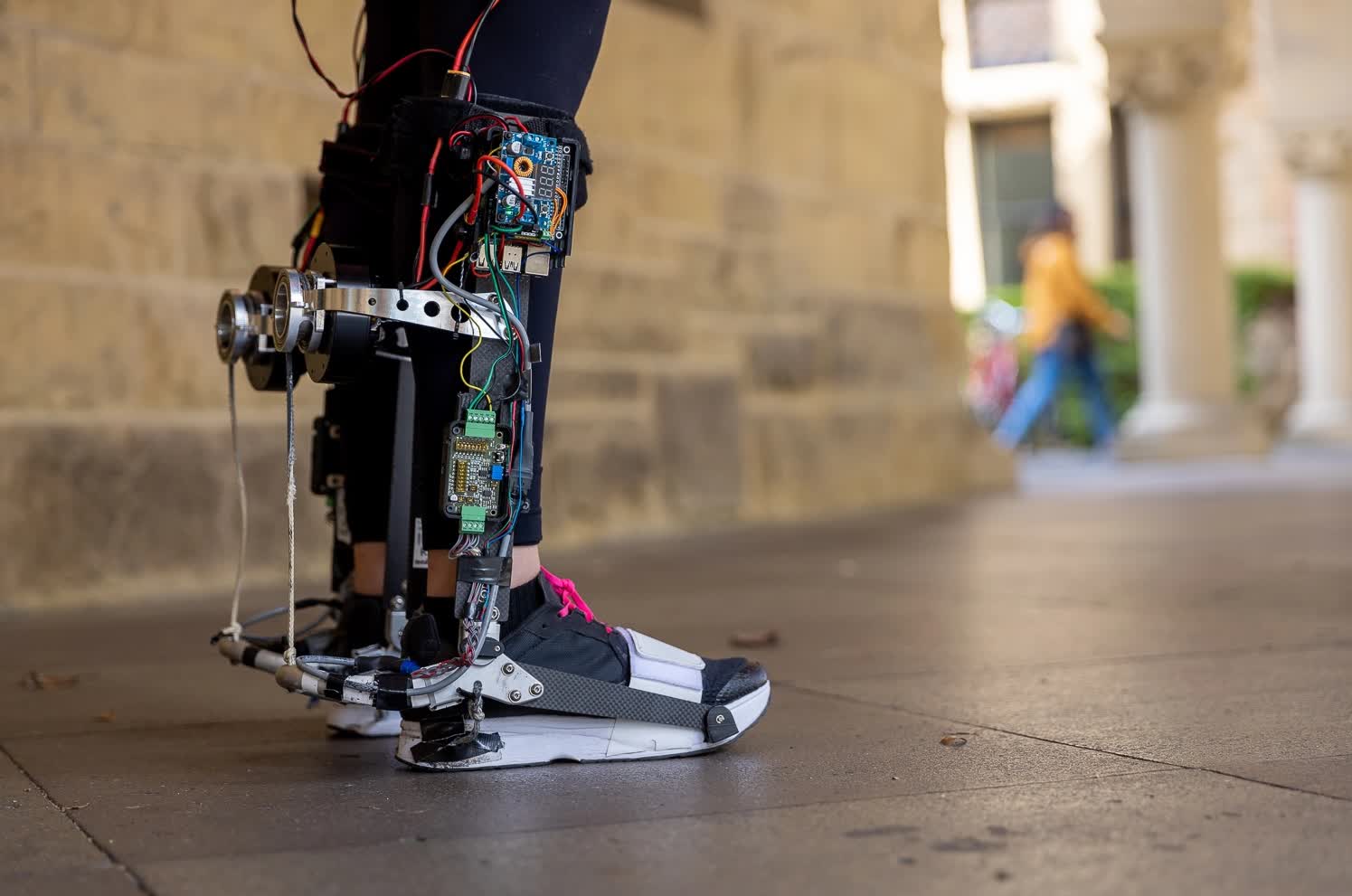
Forward-looking: Researchers at Stanford University have designed a Raspberry Pi-powered exoskeleton that could help people with mobility challenges get around easier. The wearable fits over the lower leg like a boot and is powered by a Raspberry Pi 4, which is responsible for managing a host of sensors as well as the motor and motor driver.
Patrick Slade, who worked on the project as a PhD student, said they went with a Raspberry Pi due to its affordability and the fact that it can run multiple code threads simultaneously.
Writing in Python also makes the validation process easier, Slade added.
Key to a quality adaptive device is individualization, and that's where Stanford's creation differs from others. The team spent years using exoskeleton emulators to train their machine learning model, and the investment paid off. The system needs about an hour to fully learn how the wearer walks before it can work out a custom pattern to assist but benefits can be felt within the first 15 minutes of use.

On average, wearers are able to walk nine percent faster while using 17 percent less energy. It is equivalent to taking off a 30-pound backpack, the researchers said.
"Walking with the exoskeletons quite literally feels like you have an extra spring in your step," said Ava Lakmazaheri, a graduate student who wore the exoskeleton during testing.
The results are promising, but there is still a lot of work to be done. The current prototype is quite bulky, and all of the electronics are visible. A consumer-ready version will need a visual makeover to conceal the nuts and bolts and ideally, the system could be slimmed down a bit more. Still, it's impressive considering similar systems are usually tethered and thus, restrictive.
The researchers will need to seek out commercial partners to help bring the innovation to market. With any luck, the boot could one day work alongside traditional mobility aids like walkers to help keep people active for longer.
A research paper on the subject titled, "Personalizing exoskeleton assistance while walking in the real world," has been published in the journal Nature.
Image credit: Kurt Hickman
