In context: Companies like Boston Dynamics have brought us two and four-legged robots. NASA has even been working on a “tensegrity” design called the “Super Ball Bot” that has no legs but moves by flopping itself over.
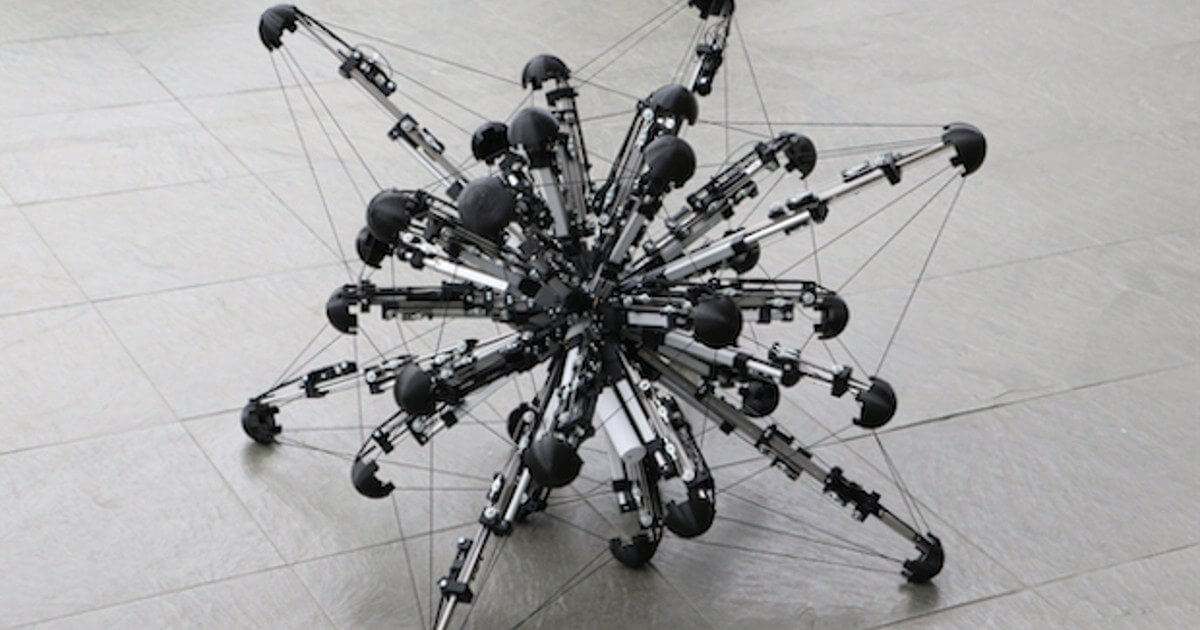
Now, robotics engineers at the University of Tokyo and Keio University in Japan have developed a 32-legged robot called “Mochibot.” The bot is spherical in shape but is actually based on a rhombic-triacontahedron framework.
Mochibot’s 32 legs do not operate using joints like other robots, notes IEEE Spectrum. Instead, the legs are telescoping linear actuators that allow the bot to deform its shape to locomote similar to the way an amoeba moves. This method of movement lets the bot go in any prescribed direction without turning. It just shortens the legs in the direction that it needs to travel and lengthens the opposite-side legs. To stop it merely flattens out its bottom parallel to the ground.
Mochibot weighs 10kg and measures about a meter across at maximum extension and about half a meter contracted. However, most of the time its legs are going to be somewhere between fully extended and fully contracted.
The scientists say the robot could be used in extraterrestrial exploration and that it has advantages over NASA’s tensegrity design.
For one, the Super Ball Bot’s method of locomotion is very complex and requires sophisticated machine-learning algorithms to move even in the simplest of paths. Mochibot can move in any direction with simple programming or even with an operator finger-tracing a route.
Furthermore, if one leg fails, there are 31 others to pick up the slack. It would take the catastrophic loss of several limbs to cripple Mochibot. On the contrary, if even one actuator or elastic cable fails on Super Ball, it will not be going anywhere until repaired.
Lastly, Mochibot is highly suited to unstable terrains like sand or loose rock. If the ground gives, it can just extend or contract its legs as needed to remain stable. Traction is not an issue as it would be for more traditional forms of locomotion.
Unfortunately, at this time Mochibot moves very slowly, as you can see in the above video. However, it is important to note that the robot is still in the very early stages of development. The first phase was funded by a grant from the NASA Innovative Advanced Concepts program, and the team has already received a second grant for Phase II.
In Phase II the researchers plan to look into how it performs on uneven terrain and studying whether it can “roll” uphill, over rocks, and traverse ditches.
https://www.techspot.com/news/76890-researchers-made-32-legged-robot-moves-like-amoeba.html
