And Yet It Moves: Designing microrobots that combine complex motion with practical size has long forced a tradeoff: devices tend to be either small and rigid or large and flexible. Researchers at Leiden University are now exploring a different path, proposing a nature-inspired design that begins to blur that boundary.
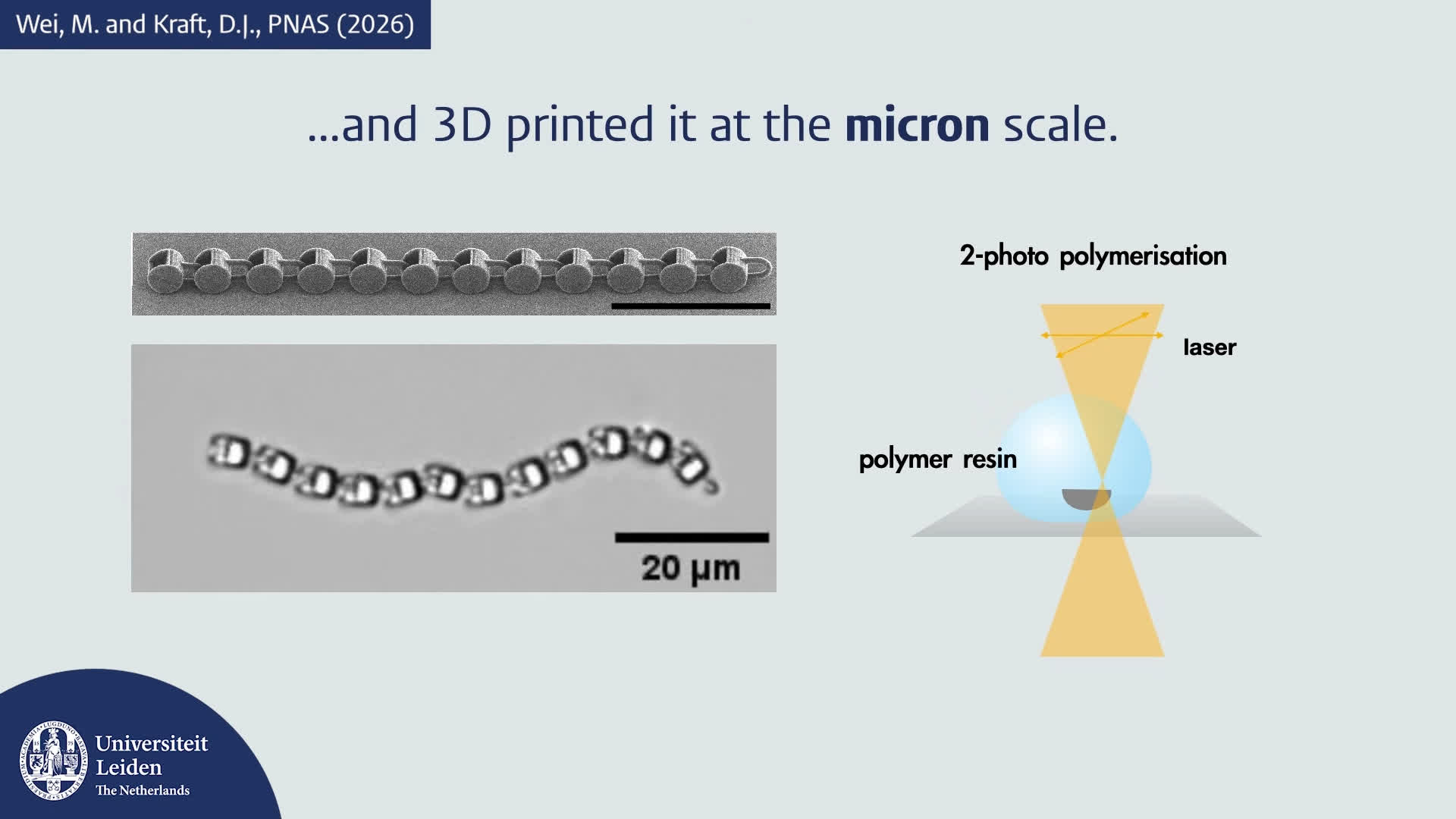
In a recently published study, the Dutch team describes an unexpected behavior observed in a 3D-printed microstructure. The "robot" consists of a flexible chain of self-propelling elements, each smaller than the width of a human hair. When exposed to an electric field, the structure begins to move on its own, adopting a worm-like motion.
The device measures just 5 micrometers in length and was fabricated using a Nanoscribe 3D microprinter, with 0.5-micrometer bar joints linking its segments. It can propel itself at roughly 7 µm per second. For context, a human hair is typically 70 – 100 µm thick, placing the robot at the edge of what current microprinting techniques can reliably produce.

Leiden professor Daniela Kraft notes that animals such as worms and snakes continuously adapt their shape as they move, a trait that helps them navigate complex environments. Larger robots often rely on similar flexibility to function effectively.
The team initially set out to build a small, flexible microrobot, but the results went further than expected. Once the electric field was applied, the chain began to move, swim, and behave in ways that resemble a living organism.
Attempts to restrain or slow it triggered a different response: the structure would twist and weave its tail, as if reacting to the constraint.
According to researcher Mengshi Wei, this behavior stems from the flexibility of the rear segments in the chain. Kraft adds that the system's behavior emerges from a tight coupling between shape and motion. Its structure influences how it moves, and its movement continuously reshapes the structure.
Despite lacking electronics or an internal power source, the microrobot can effectively respond to external stimuli, altering its form and behavior in real time, much like a biological organism.
The findings suggest that microscopic robots may not require embedded electronics to exhibit forms of adaptive, "intelligent" behavior, particularly when navigating dense or constrained environments. The researchers point to potential applications in biomedical fields, including targeted drug delivery and minimally invasive procedures.
For now, the team is focused on understanding the physics behind what they describe as a serendipitous discovery.
Kraft says the next step is to determine how such a simple, worm-like structure can produce this level of dynamic behavior. That insight could inform the design of more capable microrobots, while also shedding light on the physical principles that govern biological microorganisms.