What just happened? A compact quadcopter built around an ESP32 microcontroller has reached a measured top speed of about 67 miles per hour, demonstrating how far a low-cost, small-format platform can be pushed when engineered with precision. The drone, known as ESP-Blast, is the latest project from YouTuber and DIY engineer Max Imagination, who documented the build and flight tests on his channel.

ESP-Blast centers on an ESP32 board serving as the flight controller, a role usually handled by dedicated flight-control hardware in high-performance drones. The ESP32, which integrates a dual-core processor along with Wi-Fi and Bluetooth, is typically used in connected devices and hobbyist electronics rather than in high-speed aerial platforms.
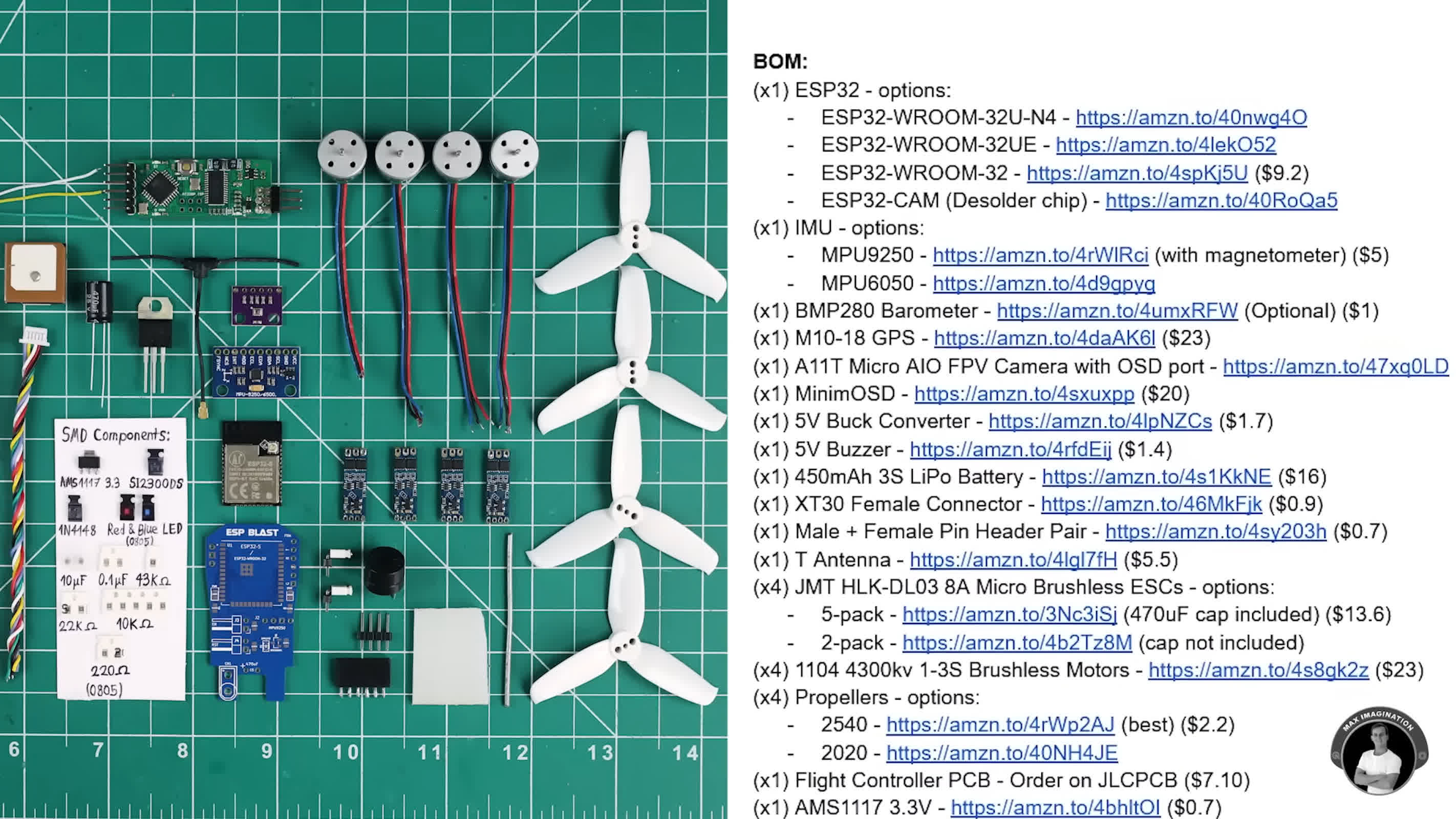
In this build, it is paired with the standard complement of supporting electronics for multi-rotor flight, including electronic speed controllers, sensors, and radio gear, yet the total bill of materials comes in at roughly $155.
The airframe is fully 3D-printed from PETG, a filament chosen for its balance of rigidity and impact resistance. Max used an Elegoo Neptune 4 Plus 3D printer to produce the frame components, iterating on the structure as he assembled, tested, and repaired the drone.
PETG's durability allowed the frame to survive repeated crashes during tuning and test flights, keeping the project within a modest budget while still enabling aggressive flight testing.

Once assembled and dialed in, the drone reached a recorded peak speed of nearly 67 mph. ESP-Blast weighs about 136 grams and runs on a 450 mAh battery pack, which keeps it airborne for roughly five minutes per charge. That short but usable flight window is sufficient for high-speed runs and data capture during a typical test session before the battery must be swapped.
The project did not come out of nowhere. Max was inspired by two DIY high-speed drone efforts that have been trading records for the fastest RC quadcopters: one led by builder Benjamin Bigg and another associated with Luke and Maximo Bell. These teams have pushed their designs into the hundreds of miles per hour, with one recent machine reaching about 411 mph. Their work on extreme-speed quadcopters provided both a reference point and a performance benchmark for ESP-Blast.
For this drone, Max sought input from Bigg. While ESP-Blast does not aim to break absolute speed records, the project demonstrates how an off-the-shelf microcontroller and a consumer 3D printer can be combined into a compact, open, and reproducible platform capable of reaching impressive speeds.
Max has indicated that he plans to continue iterating on the design, aiming to increase top speed in future versions while maintaining the low cost and accessible toolchain that define the current build.
