Something to look forward to: Robots are beginning to see and respond in real time. A new study published in Nature Communications by researchers at Beihang University in China describes a vision system that processes motion four times faster than today's leading optical-flow methods. The advance could enhance the reflexes of autonomous vehicles, industrial robots, and surgical machines.
The breakthrough builds on neuromorphic engineering, a field that designs hardware modeled after the human brain. Unlike traditional processors, which separate memory and computation, neuromorphic chips integrate both functions, enabling faster and more energy-efficient data handling. This biologically inspired approach has long been considered a promising way to narrow the gap between machine and human perception.
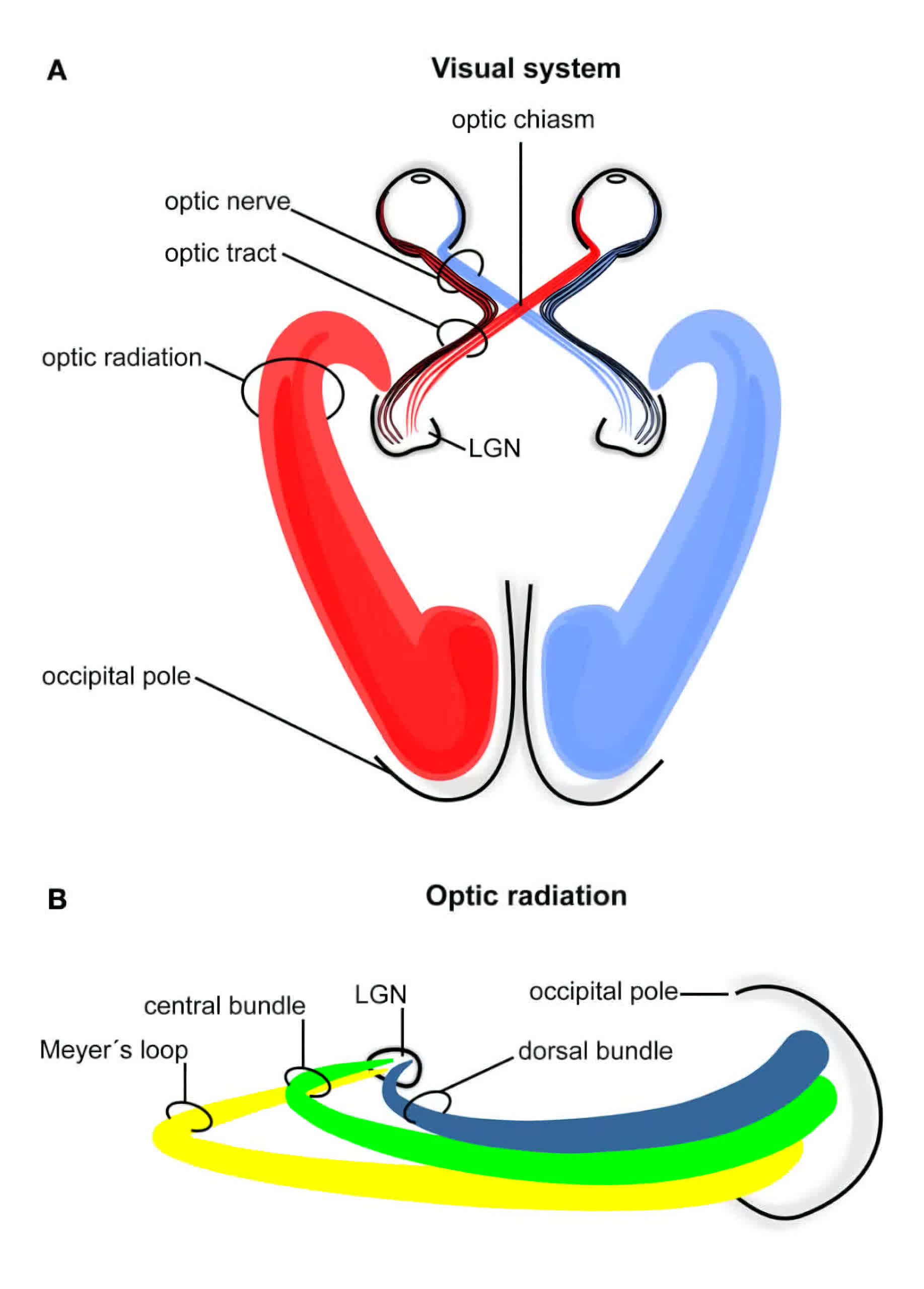
The research team, led by roboticist Shuo Gao, drew inspiration from a lesser-known brain structure: the lateral geniculate nucleus (LGN). Located between the retina and the visual cortex, the LGN acts as both a relay and a filter. Its sensitivity to temporal and spatial changes allows the human visual system to focus processing power on fast-moving or rapidly changing objects, like a cyclist swerving through traffic or a shifting stoplight. Gao's team aimed to replicate this selective attention mechanism in silicon.
In conventional robotic vision, cameras capture static frames, and optical-flow algorithms compute motion by tracking brightness changes across pixels from one frame to the next. While reliable, this method is slow – processing a single frame can take more than half a second. That delay is critical for an autonomous vehicle traveling at highway speeds, where every fraction of a second translates into meters of blind travel.
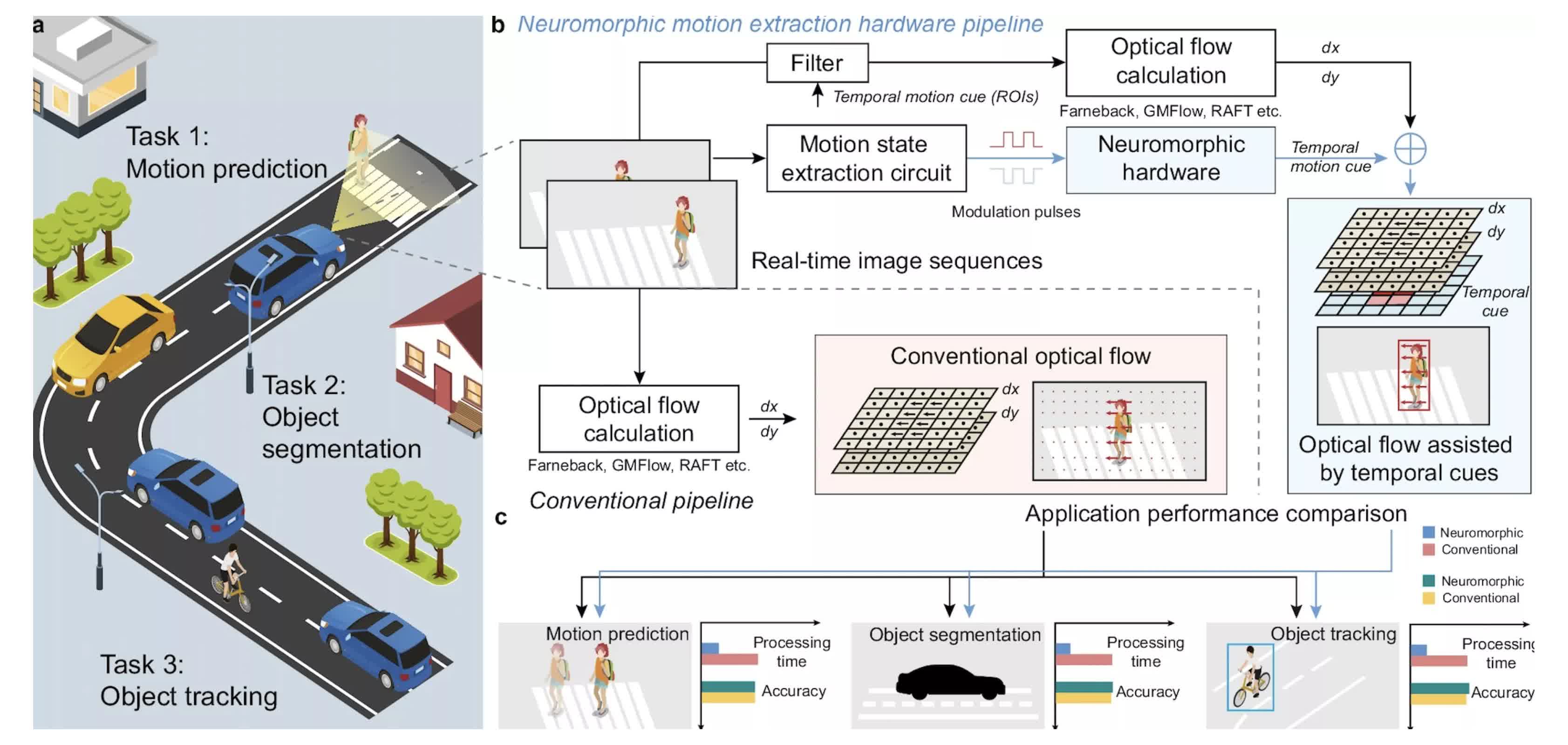
The Beihang researchers developed a custom neuromorphic module that detects changes in light intensity over time. This design allows the system to identify regions of motion in real time, directing computational resources only to areas where changes are occurring.
In tests – including simulated driving scenarios and robotic-arm tasks – the prototype reduced processing delays by roughly 75 percent and doubled motion-tracking precision during complex maneuvers.
The system still relies on conventional optical-flow algorithms for final image interpretation and struggles in visually crowded environments where multiple motions overlap. Even so, its performance represents a significant improvement over traditional hardware setups and points toward a future in which machines could achieve perception speeds that rival or even surpass those of humans.
Researchers familiar with the work say the findings could expand the range of environments in which robots can operate safely, from public streets to homes. In domestic settings where robots must detect subtle visual cues, such as gestures or shifting facial expressions, faster visual response times could make human-robot interaction feel less mechanical and more natural.
For engineers designing autonomous systems, the next challenge will be scaling neuromorphic hardware and integrating it into existing AI frameworks without sacrificing speed or accuracy. If successful, vision systems inspired by biology could redefine not only what robots see but also how quickly they understand a world in motion.