Forward-looking: In a laboratory in Esbjerg, Denmark, four engineering students have developed a prototype that blurs the line between aerial and underwater robotics. Designed and built at Aalborg University's AAU Energy department, the experimental drone can seamlessly transition from flying in the air to operating underwater – a capability engineers worldwide have been striving to achieve for years.
The device originated as the bachelor's thesis project of Andrei Copaci, Pawel Kowalczyk, Krzysztof Sierocki, and Mikolaj Dzwigalo. Over two semesters, the team developed a fully functional, waterproof prototype, whose most distinctive innovation is a system of variable-pitch propellers. By remotely adjusting the angle of the rotor blades in real time, the drone can generate the thrust needed to fly in low-density air and propel itself through the far denser medium of water.
This dual-environment engineering poses significant design challenges. Underwater propulsion faces much greater drag forces, while stability dynamics shift dramatically between air and submersion.
The students addressed these issues with a combination of mechanical and software solutions, fine-tuning their propeller system and integrating stabilization algorithms to maintain control in both environments. The waterproof housing also required meticulous design, incorporating sealing systems and corrosion-resistant materials to prevent water ingress under varying pressures.

"All the core components were manufactured in-house," said Associate Professor Petar Durdevic, one of the project's supervisors along with Associate Professor Mads Valentin Bram. "They used a combination of 3D printing for custom geometries, CNC machining for structural strength, and lightweight, corrosion-resistant materials – showcasing modern prototyping techniques at a professional standard."
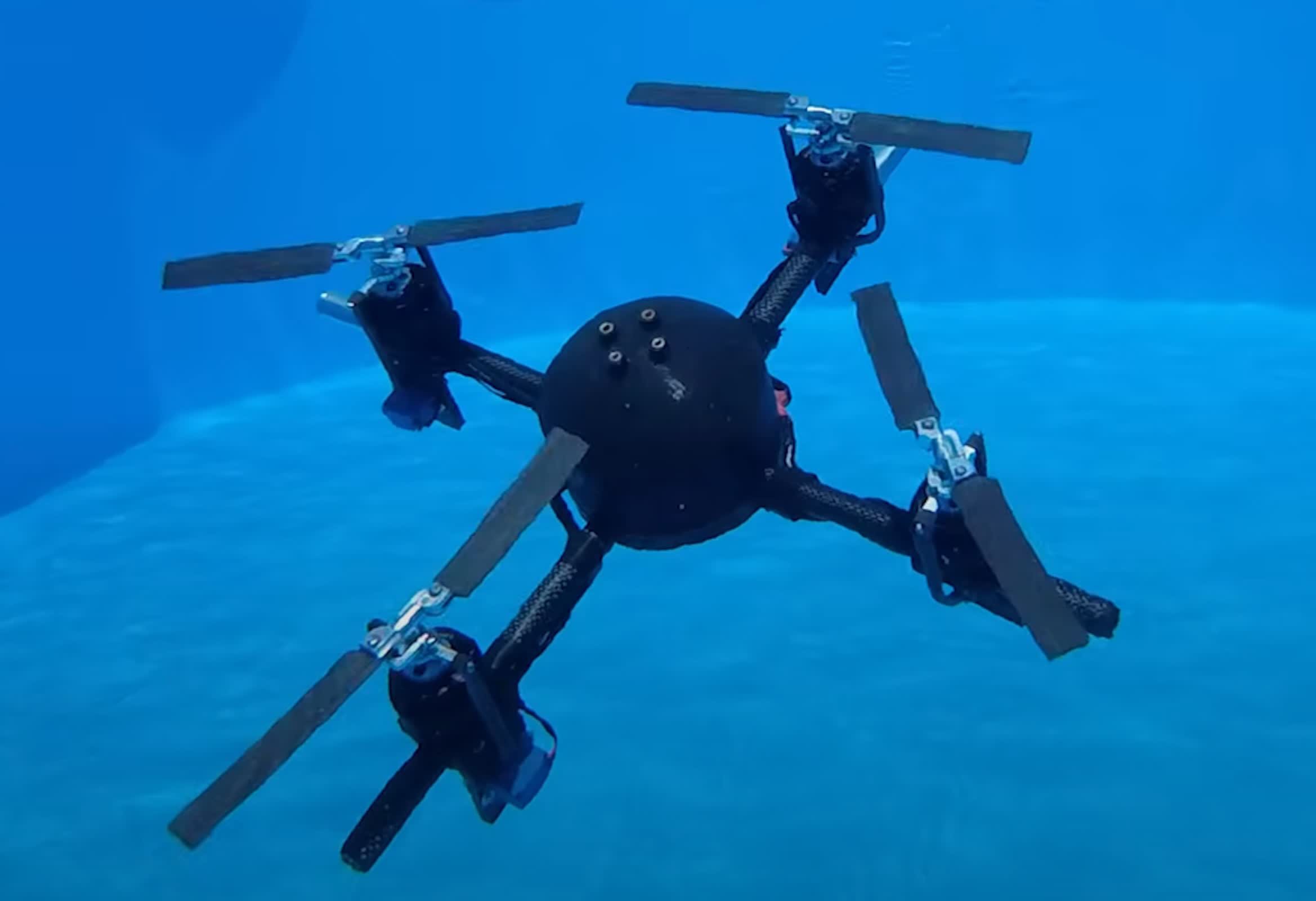
Video demonstrations of the drone show it hovering above the water before submerging into a test pool, maneuvering like a small submersible, and then launching vertically back into the air.
While the prototype's endurance and depth limits are still under evaluation, comparable hybrid systems worldwide typically sustain underwater operations for several tens of minutes and aerial flight for a few minutes at a time.
The AAU design has been engineered to support various payloads, such as cameras, sonar, and environmental sensors, that could significantly broaden its real-world applications.
The potential applications for this technology are vast. In maritime industries, such drones could inspect ship hulls or underwater infrastructure without requiring separate aerial and submersible units. Search-and-rescue teams might deploy them during floods or coastal disasters to locate missing persons, scanning areas both above and below the waterline. Military and coast guard operations could use them for port surveillance or covert reconnaissance. Environmental scientists could leverage the drones to monitor marine habitats and collect multi-layered ecosystem data in a single mission.
Hybrid drones are not exclusive to Denmark. Prototypes such as China's Nezha SeaDart and TJ-FlyingFish have demonstrated similar transition capabilities, but the AAU team's independent design and local manufacturing set their work apart. Rather than relying on commercial components or pre-built systems, the students engineered an adaptable platform entirely from the ground up.
For now, the drone remains in its testing phase, with planned refinements focused on endurance, control systems, and payload integration.